PKSS-Align: Robust Point Cloud Registration on Pre-Kendall Shape Space
IEEE Transactions on Visualization and Computer Graphics (TVCG)
Chenlei Lv, Hui Huang*
Shenzhen University
Abstract
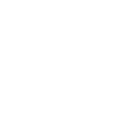
Point cloud registration is a classical topic in the field of 3D Vision and Computer Graphics. Generally, the implementation of registration is typically sensitive to similarity transformations (translation, scaling, and rotation), noisy points, and incomplete geometric structures. Especially, the non-uniform scales and defective parts of point clouds increase probability of struck local optima in registration task. In this paper, we propose a robust point cloud registration PKSS-Align that can handle various influences, including similarity transformations, non-uniform densities, random noisy points, and defective parts. The proposed method measures shape feature-based similarity between point clouds on the Pre-Kendall shape space (PKSS), which is a shape measurement-based scheme and doesn't require point-to-point or point-to-plane metric. The employed measurement can be regarded as the manifold metric that is robust to various representations in the Euclidean coordinate system. Benefited from the measurement, the transformation matrix can be directly generated for point clouds with mentioned influences at the same time. The proposed method does not require data training and complex feature encoding. Based on a simple parallel acceleration, it can achieve significant improvement for efficiency and feasibility in practice. Experiments demonstrate that our method outperforms the relevant state-of-the-art methods.
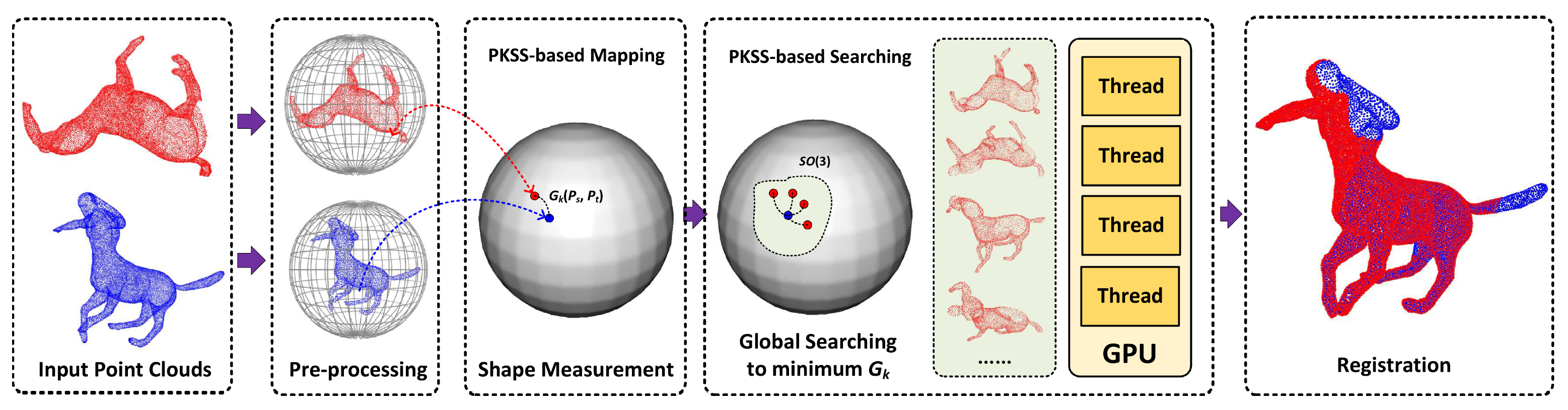
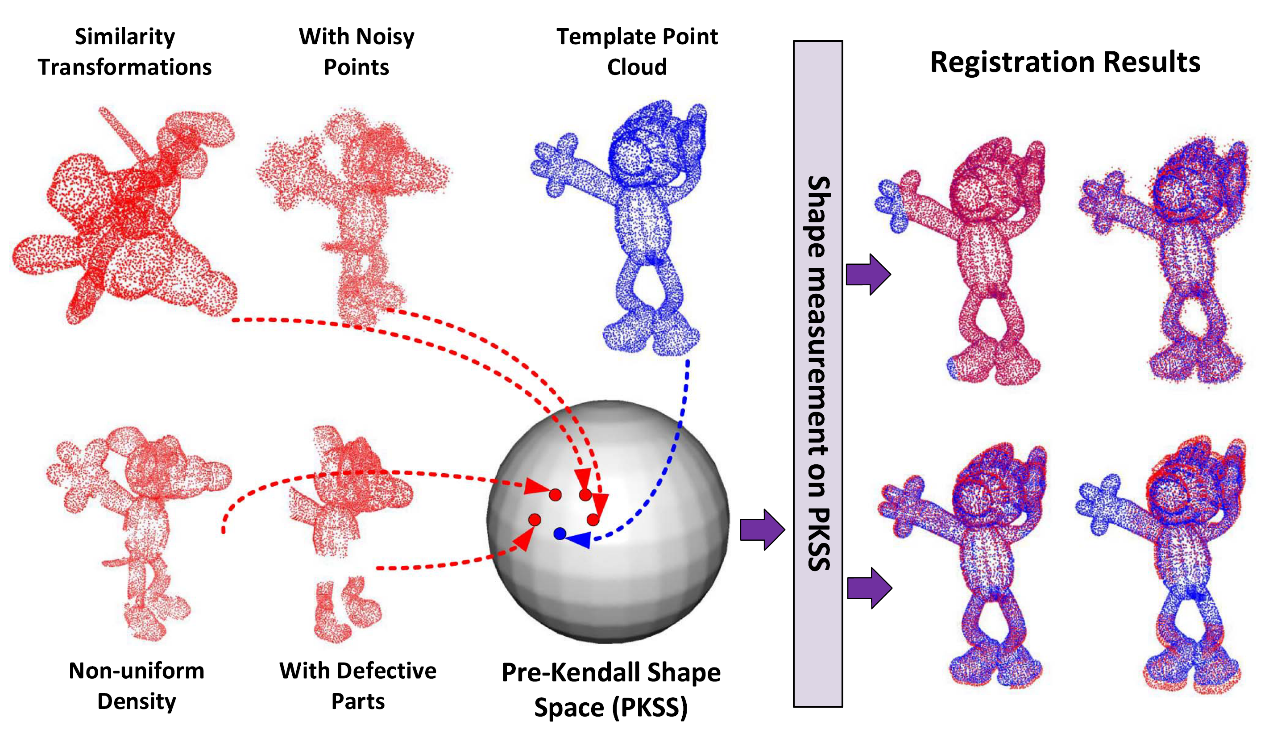
Figure 1: The pipeline of PKSS-Align. Firstly, the pre-processing is used to normalize point clouds and remove outliers; secondly, the shape measurement estimates the pose similarity between point clouds in current state; finally, the global searching is to find the best transfer matrix based on the shape measurements from the candidate transfer set in parallel.
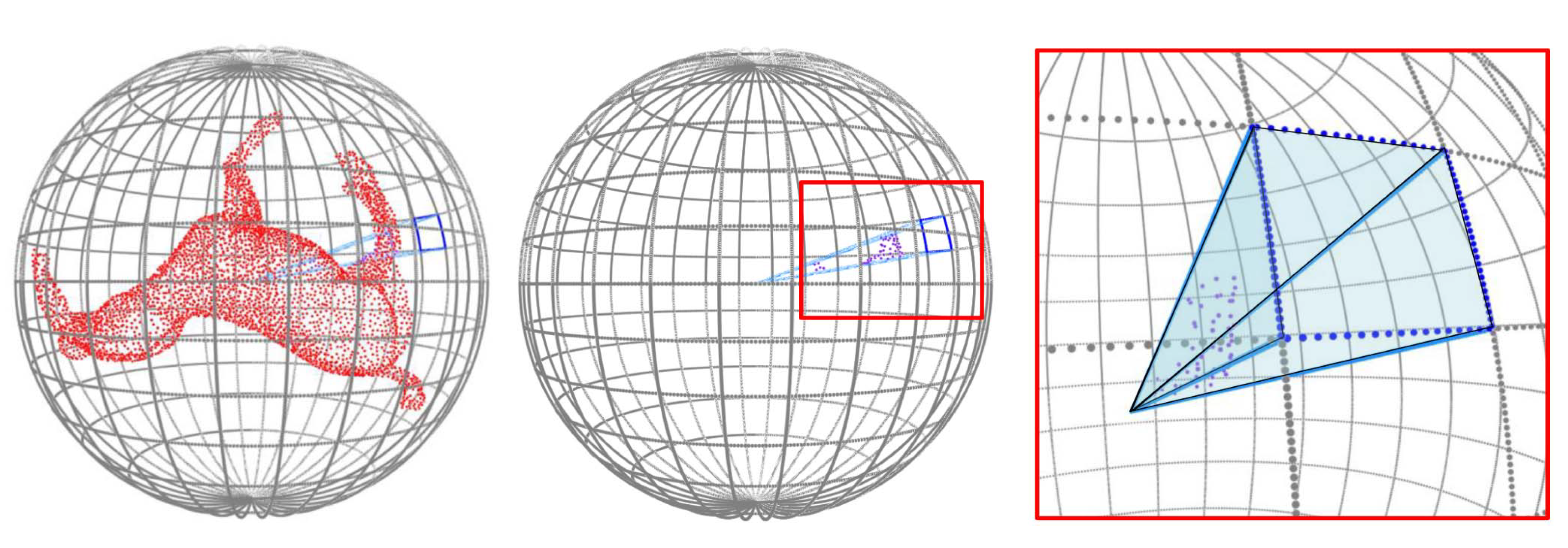
Figure 2: An instance of partition structure with sub-spaces.
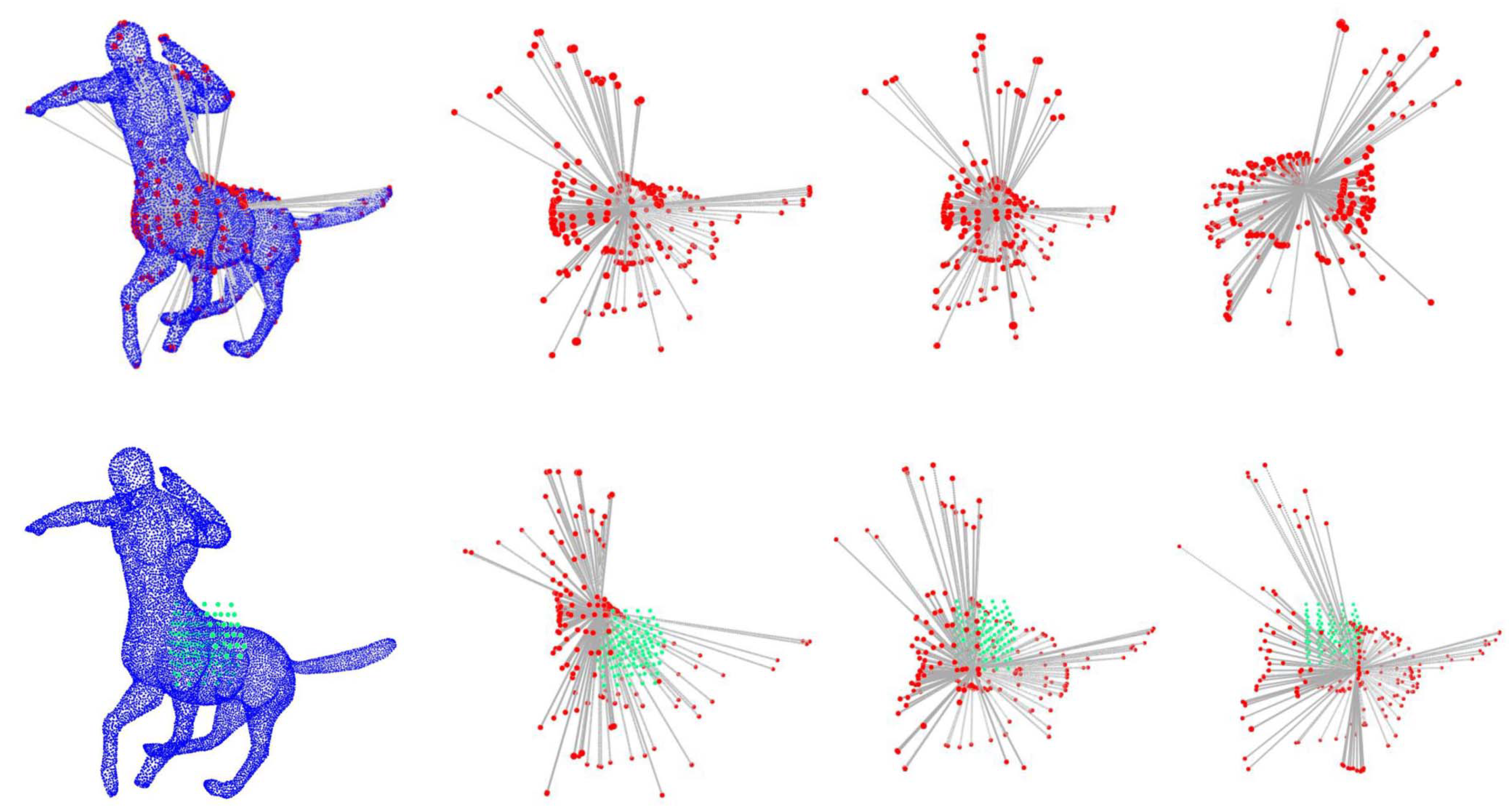
Figure 3: Instances of candidate rotation and translation sets. First row: instances of Oc; second row: instances of Sc (green points represent candidate centers).
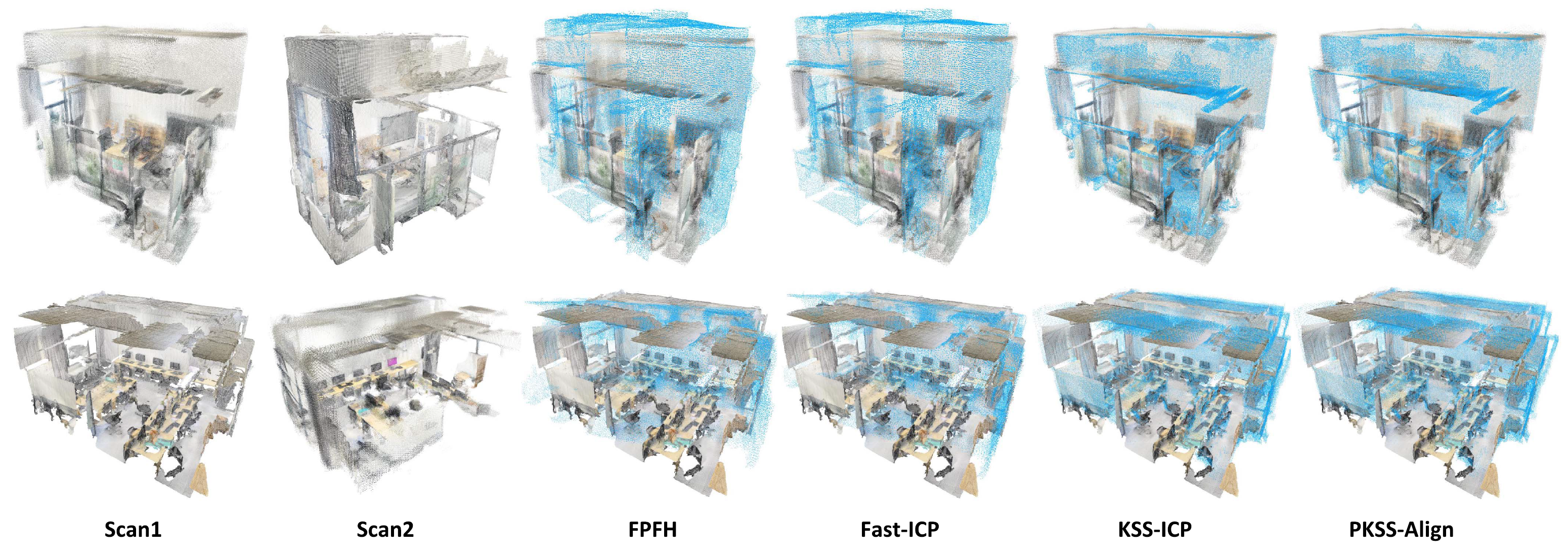
Figure 4: Registration results in the real scene. The registration methods align scan2 to scan1. Point clouds are scanned by iphone12pro.
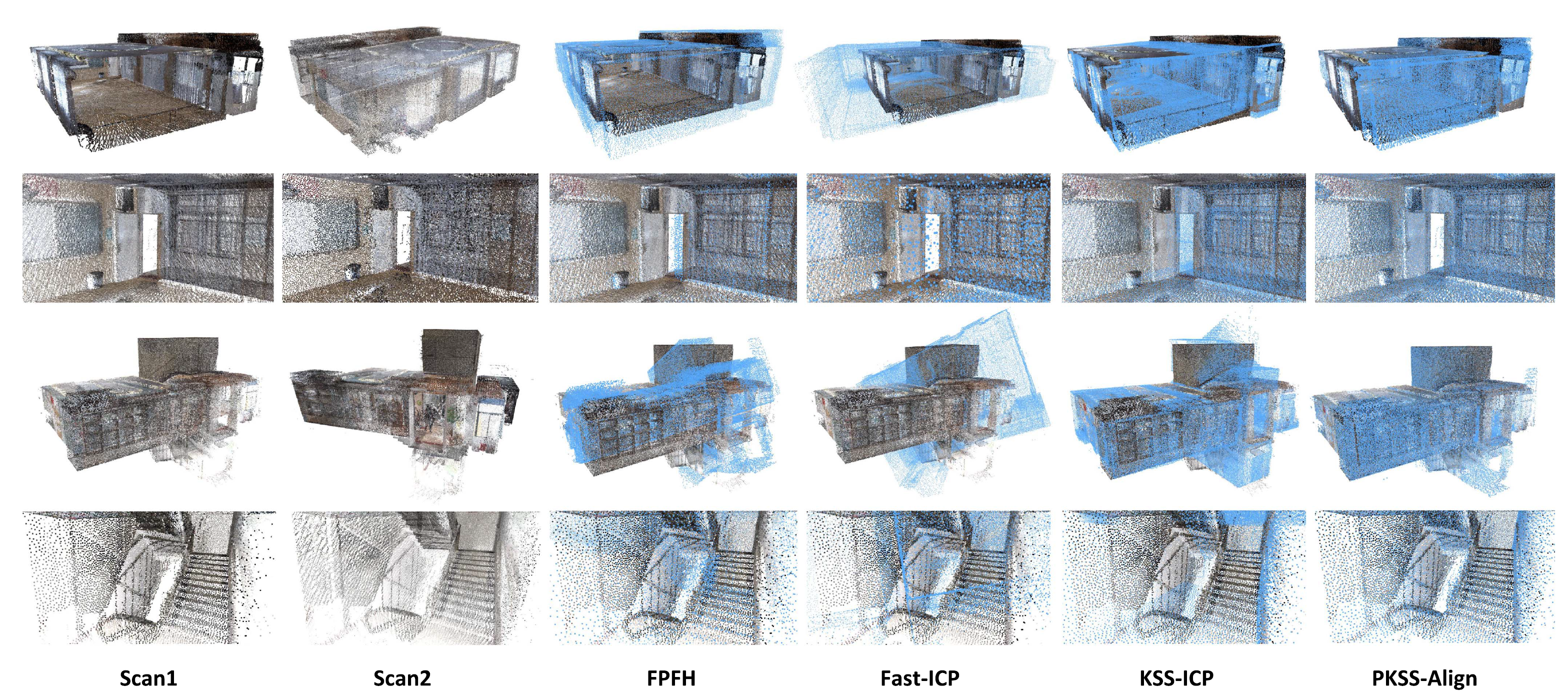
Figure 5: Registration results in the real scene. The registration methods align scan2 to scan1. Point clouds are scanned by LiDAR device.
Acknowledgement
This work was supported by National Key R\&D Program of China (2024YFB3908500, 2024YFB3908502), NSFC (U21B2023), Guangdong Basic and Applied Basic Research Foundation (2023A1515110292), Shenzhen Science and Technology Program (KJZD20240903100022028, KQTD20210811090044003, RCJC20200714114435012), Scientific Foundation for Youth Scholars of Shenzhen, and Scientific Development Funds from Shenzhen University.
Bibtex
@article{lv2025pkss,
title={PKSS-Align: Robust Point Cloud Registration on Pre-Kendall Shape Space},
author={Lv, Chenlei and Huang, Hui},
journal={IEEE Transactions on Visualization and Computer Graphics},
year={2025},
volume={31},
number={12},
pages={10356-10371},
publisher={IEEE}
}
Downloads